CS 6670 Computer Vision
Project 1: Feature Detection and Matching
Name: Daniel Lee (djl59@cornell.edu)
Questions to answer:
Describe your feature descriptor in enough
detail that someone could implement
My
custom descriptor is a fully implemented 5x5 pixels space assigned to each
feature detected. Each pixel has a numerical value which is the magnitude of
the second derivative of the image space. The magnitude is calculated as shown
in (1)
![]() ������������������������������ (1)
������������������������������ (1)
![]() ���������������������������� (2)
���������������������������� (2)
The
equation (2) is computed by convolving the image with a gradient kernel.
However, since the feature detection is more robust for a smoothed image, it is
preferred to have a smoothed image. However, since smoothing operation and
derivation operation are both linear, they are associative. Therefore, in order
to obtain the gradient of a smoothed image, it is valid to convolve the
original image with a gradient of Gaussian kernel. Thus, ![]() �is computed by
convolving the original image with a derivative of a Gaussian kernel with
respect to the x direction. The
derivative of Gaussian is computed in MATLAB using gradient.m function, which
outputs two gradient matrix in x and y direction. The numerical values are
omitted here, but can be found in features.h file in the source code.
�is computed by
convolving the original image with a derivative of a Gaussian kernel with
respect to the x direction. The
derivative of Gaussian is computed in MATLAB using gradient.m function, which
outputs two gradient matrix in x and y direction. The numerical values are
omitted here, but can be found in features.h file in the source code.
The
second derivative of the image can be calculated by applying an additional
gradient kernel. Simply, ![]() . However, since we already have the gradient of
Gaussian, we can convolve with the gradient of the Gaussian twice, which will
generate the second derivative of the twice smoothed original image (with
Gaussian kernel).
. However, since we already have the gradient of
Gaussian, we can convolve with the gradient of the Gaussian twice, which will
generate the second derivative of the twice smoothed original image (with
Gaussian kernel).
My
custom descriptor has similar initial steps as MOPS. It does use the orientation
of the feature, and obtain the rotated region of interest. The acquisition of
rotated image is done following these steps:
1. Using a rotation matrix, rotate a 100x100 pixels space
around the feature. If this region is outside of the boundary, simply copy the
value of the boundary. For example, if the 100x100 is outside of the top-right
boundary, it will copy the intensity values from top and right boundary pixels.
2. The rotation will miss some pixels since pixel
coordinates are in integer form. Therefore, fill in the missing pixels by
taking the average of the surrounding 8 pixels.
3. Crop the middle 45x45 pixels.
Then,
down-sample it to 5x5 pixel space by calculating (1). For example, in order to
calculate the (0, 0) index of the descriptor, do the following:
1. Multiply the first 9x9 pixel space of the original
image with magnitude square of 9x9 gradient of Gaussian both in x and y direction.
2. Add up all the numbers for x and y direction.
3. Compute
(1), where ![]() �is the summation you just calculated in the
step above
�is the summation you just calculated in the
step above
Above
steps are repeated for each 9x9 sub-regions of the 45x45 images (there are
total 25 9x9 sub-regions in the 45x45 rotated image).
To
conclude, my custom descriptor has a magnitude of the second derivative of the
smoothed image using Gaussian kernel.
Explain why you made the major design
choices that you did
A
simple window descriptor is not robust to the rotation. MOPS descriptor does
rotate the region of interest with an angle calculated from eigenvalue calculation, which represents the
direction of the largest change. To make my descriptor somewhat robust to the
rotation, the initial steps of rotating image was necessary. Then, the
problem is how to represent the uniqueness of the feature. Simple 1-to-1
comparison of intensity value of the image is not robust to constant shifting
or scaling. Also, the angle with respect to the plane is also difficult to
solve without homography information. Once the region
of interest is rotated to the same angle, the most efficient way of comparison
would be the how intensity value changes within the region with respect to
certain directions. Therefore, first or second derivative is selected to be
evaluated. The first derivative gives somewhat reasonable information, but was
not robust enough � it creates a large number of false positives. Then, second
derivative was used to describe the feature. Second derivative is the
derivative of the first derivative, and thus represents the uniqueness of the
feature far better. And the actual performance was significantly better than
the first derivative.
Report
the performance
Here, ROC curves of feature comparison
are presented. Two cases are studied: graf and Yosemite
images. The graf
images have translation AND rotation components, while Yosemite only has translation. ROC curve shows the performance of
the feature matching. While the true homography
information is given, it is possible to calculate the correct transformed pixel
position from image 1 to 2. Using these correct values, ROC curve shows the
evaluation result of the matching. A good feature matching algorithm should
show a higher true positive rate with a small false positive rate. Along with
the ROC curves, AUC values are presented for each descriptor and each
comparison method. AUC means Area Under the Curve. Therefore, the higher AUC, the better
performance feature matching did. Along with other plots, also two images for
each graf
and Yosemite image set, an image of
Harris operator is presented. Please note that the actual Harris value was too
small, so it needed to be up-scaled by the factor of 100. Yosemite graphics are rather large, but it is not resized for the
originality of the picture.

Figure 1 ROC curve of graf images with
six different descriptors and 2 different methods used for feature matching
|
|
SimpleWindow |
MOPS |
Custom |
|
SSD Test |
0.549302 |
0.783026 |
0.797184 |
|
Ratio Test |
0.620259 |
0.740182 |
0.740142 |
Table 1 AUC results of feature matching with graf images
|
Figure 2 An Image of Harris operator for img1.ppm
of graf pictures |
Figure 3 An Image of Harris operator
for img2.ppm
of graf
pictures |



Figure 4 ROC curve of Yosemite
images with six different descriptors and 2 different methods used for feature
matching
|
|
SimpleWindow |
MOPS |
Custom |
|
SSD Test |
0.975227 |
0.986522 |
0.983423 |
|
Ratio Test |
0.894571 |
0.878535 |
0.866802 |
Table 2 AUC results of feature matching with Yosemite images
|
Figure 5 An Image of Harris operator for Yosemite1.jpg
of Yosemite pictures |
Figure 6 An Image of Harris operator for Yosemite2.jpg of Yosemite pictures |


Benchmark results are shown here for 4 different image sets: graf, bikes, wall, leuven
|
|
|
|
graf |
bikes |
wall |
leuven |
|
Simple Window Descriptor |
SSD Test |
Average Error (pixel) |
246.690682 |
377.465159 |
358.517751 |
387.398232 |
|
AUC (-) |
0.507024 |
0.391937 |
0.522764 |
0.376290 |
||
|
Ratio Test |
Average Error (pixel) |
246.690682 |
377.465159 |
358.517751 |
387.398232 |
|
|
AUC (-) |
0.542306 |
0.499773 |
0.559906 |
0.510037 |
||
|
Custom Descriptor |
SSD Test |
Average Error (pixel) |
238.396335 |
261.378072 |
388.526983 |
340.994311 |
|
AUC (-) |
0.534563 |
0.662301 |
0.395809 |
0.315363 |
||
|
Ratio Test |
Average Error (pixel) |
238.396335 |
261.378072 |
388.526983 |
340.994311 |
|
|
AUC (-) |
0.539954 |
0.630166 |
0.546416 |
0.488659 |
Table 3 Benchmark results showing average error and AUC for four
image sets. It was done on both simple and custom descriptor. The smaller
values are better in average error, and larger is better in AUC comparison.
Each image sets have its own characteristics. graf
has both translation and rotation in plane and in the view angle (like turning
your head clockwise). wall
images have little translation but vivid rotation in plane. bikes has almost no translation
and rotation, but the images are blurred more and more. leuven
images also have almost no translation and rotation, but the images are getting
darker and darker. In graf, bikes, and leuven image sets, the custom descriptor
showed improvement over the simple window descriptor. Especially in bikes and leuven, the
custom descriptor shows much improvement. Therefore, the strength would be the robustness to the light condition /
blurriness. The performance over the graf images is not significantly better and is worse over wall images. This means that the custom
descriptor is not robust to the in plane
rotation. Both graf
and wall images have some in plane
rotation and the performance is not good. Therefore, the weakness is the in plane
rotation.
Custom Pictures
Performance
��������������� Total 4 pictures are taken for
performance test. All of them are from Memorial Hall in Willard Straight Hall
in Cornell University. First two pictures have mostly about translation
component. The second two pictures have in-plane rotation.

Two corners of the piano are selected. As shown in the right
picture, it shows a good response for the matching. It successfully detected
the piano corners on the right picture.

Some of the sofa corners and chair corners are selected. Also,
one picture on the wall picture is selected too. On the right picture, it
successfully found the wall picture, and some sofa corners. There are some
false positives for the chair corners.
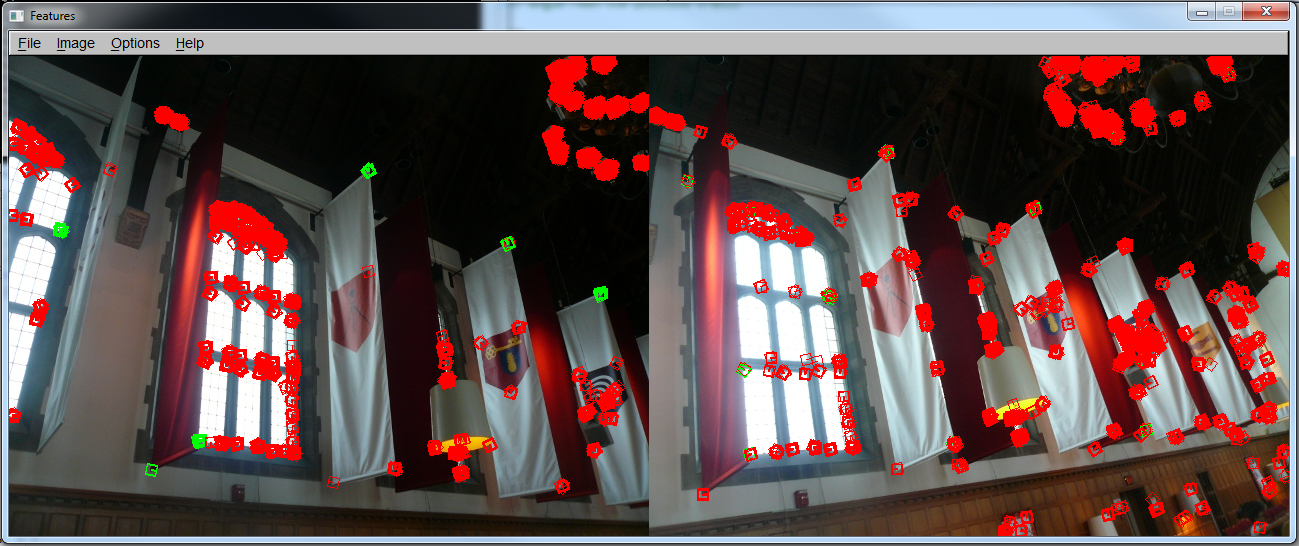
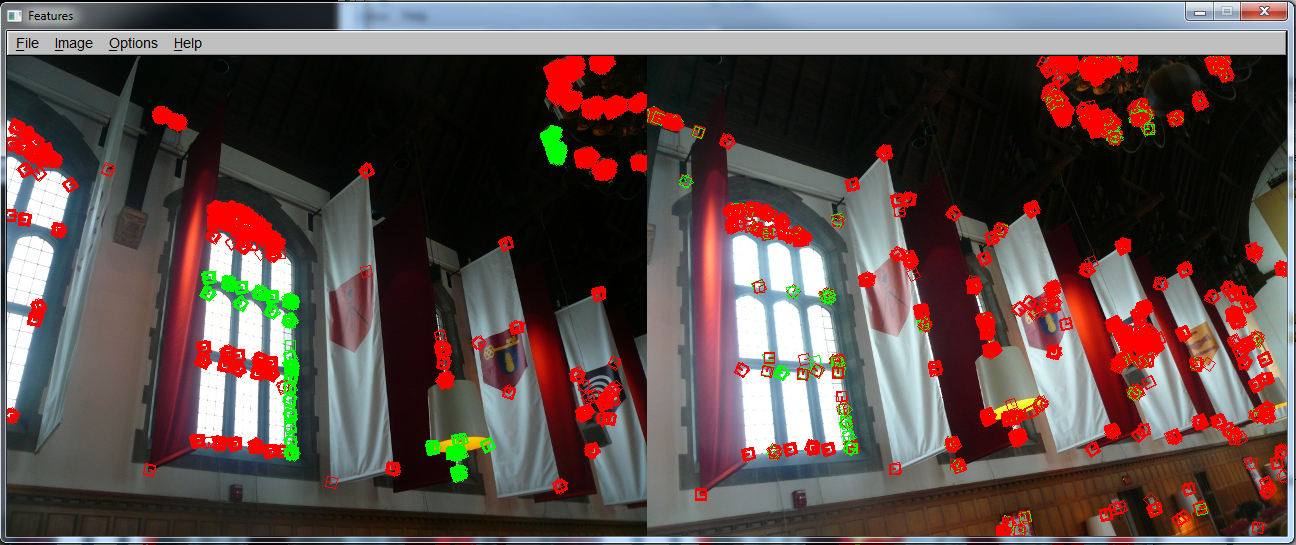
Obvious corners of these flags (which represent each college
of Cornell) are selected. The performance is not great here.
Window corners and lamp corners are selected. It did find some
of the features, but mostly failed. The middle white lamp�s features are not
matched at all.
Above pictures show that the
custom descriptor is not robust to the in-plane rotation. The first two pictures show
some translation component, which it works well. However, in the bottom two
pictures, which show in-plane rotation, the matching did not work out well.